
【导读】2019年12月,空客宣布Vahana eVTOL验证机完成所有飞行和测试科目,项目圆满结束。该项目作为空客进军UAM市场的第一款验证机,成功实现了全电动垂直起降飞行和自主飞行,并加深了对eVTOL商业模式的理解,为空客继续深耕UAM市场奠定了良好的基础,同时也给其他相关方提供了有益的借鉴。
中国航空工业发展研究中心的穆作栋博士对Vahana项目进行了全面了跟踪、分析和总结,我们将分3期刊登穆博士的文章,供读者参考。今天将刊登第一期,对Vahana演示验证计划进行概要介绍。
2015年前后,城市空运市场逐渐受到业界关注,一方面城市化带来了巨大的空中交通市场需求;另一方面随着电动汽车、无人机、互联网等行业的快速发展,电池安全性与能量密度满足航空应用的需求,低成本、可靠机载系统供应商涌现,机器视觉与人工智能技术为自主飞行、空中避障创造了可能,先进复合材料加工技术推动了小型航空器生产。
在市场需求与技术发展的推动下,空客公司于2015年在美国硅谷建立了A3创新中心,旨在吸引人工智能、自主飞行、数据分析等新技术领域的人才、推动技术创新。Vahana是空客A3创新中心的首批研究任务之一,于2015年提上日程,共有100余名研究人员参与项目,通过电推进、机器视觉、人工智能等技术的融合,实现全电动、自主驾驶、垂直起降飞行。
Vahana演示验证计划于2016年初正式启动,首先通过飞行器构型多学科优化权衡研究确定了飞行器构型,2017年完成了全尺寸验证机的装配工作和数百次缩比样机飞行测试,2018年1月31日全尺寸验证机在美国俄勒冈州彭德尔顿无人机系统基地(Pendleton UAS Range)以完全自动驾驶方式完成首飞,飞行高度为5米,随后安全降落;2019年5月3日,Vahana在第58次飞行测试中完成了首次垂直和前向飞行之间完整过渡;2019年6月,Vahana在巴黎航展进行了展示;2019年11月14日完成的第138次飞行测试标志着项目结束。在研究过程中,共制造2架全尺寸验证机,分别为Alpha 1和Alpha 2。
1.飞行器布局及关键参数
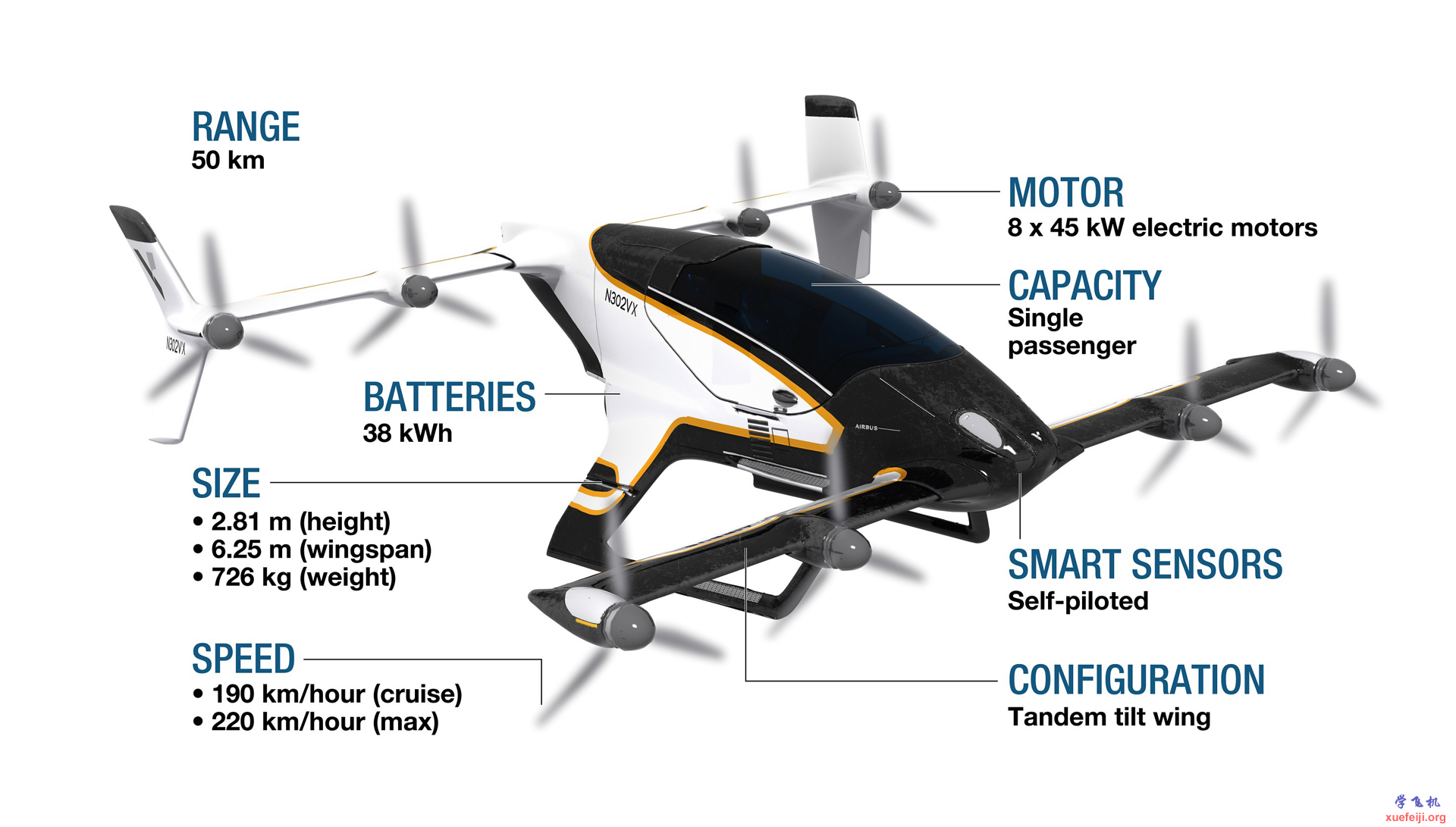
Vahana飞行器的驾驶舱为单座,采用倾转翼布局,共8台电动机(机身前、后各4台,单台功率45千瓦)提供升力与动力,可在垂直起降与水平飞行两种模态间切换。翼展6.25米,机高2.81米,重726千克。采用全电推进的动力形式,在机身后部配有可装卸的电池组(2×136千克,约占全机重量的40%),容量38千瓦时,可实现20分钟航时、50千米航程。巡航速度为190千米/小时,采用自动驾驶模式,可通过机身前部的机载识别系统识别空中和地面的障碍物。
图 1 Vahana飞行器及其主要参数(图片来源:空客公司)
图 2机身后部可装卸电池组,便于地面维护期间充电(图片来源:A3)
Vahana的最初构型设计始于研究者在餐巾纸上随手画出的草图,随后研究者根据概念可行性以及技术成熟度不断调整,逐步形成了最终构型。
图 3 Vahana草图与概念图的发展历程(图片来源:空客公司)
2.机载系统
Vahana的座舱空间可供一名乘客使用,舱内正前方设置有一台高清屏幕,可显示飞机前方飞行路径等信息。由于该机为无人驾驶,因而没有飞行员座位,在俄勒冈州彭德尔顿进行的飞行测试过程中,验证机的飞行处于远程控制状态,通过远程操控飞行器实现起飞、降落等操作。
图 4 VahanaAlpha 2验证机机舱(图片来源:A3)
Vahana机载系统包括GPS、惯性导航单元、大气数据探测器等,可获取飞行器位置和姿态信息。飞行器的飞行路径是预先计划的,由远程操作员控制。Vahana的感知和避障系统包括能够探测和追踪空中目标的雷达和相机,以及扫描着陆区固定和移动障碍物的激光雷达,近地自动化技术(Near Earth Autonomy)公司提供的Peregrine传感器集成了一个扫描激光雷达和下视相机。
Vahana验证机飞行控制系统是由脉冲输入控制的,具体而言,脉冲输入包括短程滚转、俯仰、偏航或推进等命令。飞行测试对于技术人员了解飞行器在每个飞行阶段如何响应这些输入非常重要。通过观察和分析飞行器的反应,能够指导飞行控制系统的进一步开发。Vahana验证机飞行控制系统对该飞行器从垂直起降过渡到悬停、向前飞行的模态转换过程至关重要,转换状态时飞行器的速度高达80-90节(148-167千米/小时)。
图 5鼻锥的近距离视图,其中设置有感知和避障传感器(图片来源:A3)
3.主要成果
Vahana演示验证计划的主要成果有3项:
1)实现了全电推进垂直起降飞行
研究团队设计了全电动推进系统,包括电池、电动机、逆变器、高压配电系统和作动器,实现了倾转翼飞行。累计完成138次全尺寸验证机飞行试验,总计900公里,飞行时间超过13个小时,此外还完成了上千次缩比验证机飞行试验。
2)提高了自主飞行技术能力
深入研究了自主飞行的核心技术问题,包括实时监测与避障技术。研究团队开展了先进传感器设计,结合监测数据确定避障策略、开发控制律,并形成控制软件。
基于Vahana飞行测试,A3进一步提出了单独的自主飞行研究计划,名为寻路者(Wayfinder)。寻路者计划将开发通用的自主飞行软件及硬件,可推广应用到包含城市空运飞行器和大型客机在内的各类飞机上,一方面基于计算机视觉等技术提升飞行器感知能力,另一方面基于机器学习等技术为飞行器提供决策与自主导航能力,通过数据驱动的方法能够将大量飞行员的飞行经验应用到飞行控制中。寻路者计划与空客开展的“自主滑行、起飞和着陆”(ATTOL)研究都是空客“大型商用飞机单飞行员驾驶”研究框架的组成部分。
3)加深了对电动城市空运商业运营的理解
相关研究评估了飞行器性能对未来城市空运商业运营的意义,有助于空客的战略决策过程。基于Vahana计划的经验,空客于2018年中期成立了城市空运部门。
(航空工业发展中心 穆作栋)
 粤公网安备 44040302000324号
粤ICP备15064906号 Powered by Xuefeiji X1.0 Code ©2003-2020
粤公网安备 44040302000324号
粤ICP备15064906号 Powered by Xuefeiji X1.0 Code ©2003-2020



